Abstract
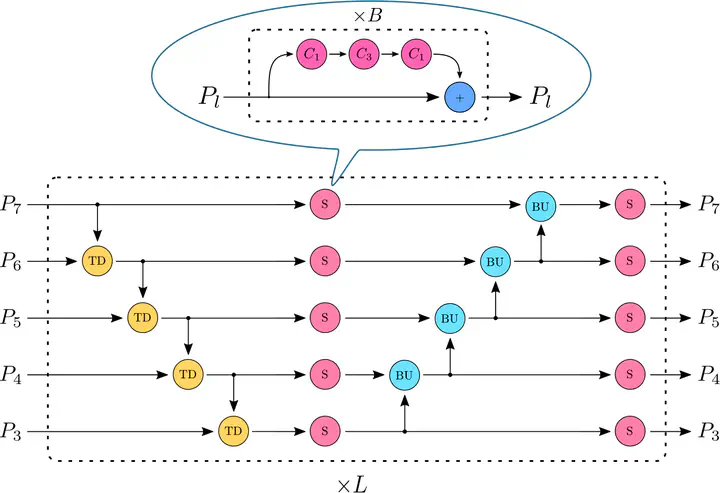
Feature pyramids have become ubiquitous in multi-scale computer vision tasks such as object detection. Given their importance, a computer vision network can be divided into three parts; a backbone (generating a feature pyramid), a neck (refining the feature pyramid) and a head (generating the final output). Many existing networks operating on feature pyramids, named necks, are shallow and mostly focus on communication-based processing in the form of top-down and bottom-up operations. We present a new neck architecture called Trident Pyramid Network (TPN), that allows for a deeper design and for a better balance between communication-based processing and self-processing. We show consistent improvements when using our TPN neck on the COCO object detection benchmark, outperforming the popular BiFPN baseline by 0.5 AP, both when using the ResNet-50 and the ResNeXt-101-DCN backbone. Additionally, we empirically show that it is more beneficial to put additional computation into the TPN neck, rather than into the backbone, by outperforming a ResNet-101+ FPN baseline with our ResNet-50+ TPN network by 1.7 AP, while operating under similar computation budgets. This emphasizes the importance of performing computation at the feature pyramid level in modern-day object detection systems.